
Movement Lab - Research
Please see the publications page for a list of manuscripts on these topics.
Please see the press page for various videos and popular science articles on our research.
 |
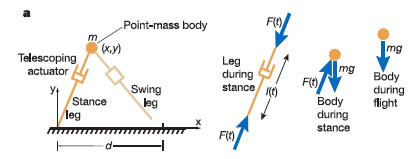 |
Legged locomotion and motor control. Why do animals move the way they do? And how do they do it so well? I am interested in obtaining a simple and tractable, yet complete, theory of legged locomotion and sensori motor control in humans and other animals -- a theory that will reliably predict how an animal will move in a novel situation (say, humans on the moon) and how the animal will respond to perturbations (say, stepping on a banana peel).
Numerical optimal control and optimization. A key component of my research is the solution of optimization problems with differential equations as constraints (optimal control). The optimal control problems that arise from legged locomotion questions can be large-scale, non-smooth (depending on the formulation), and generally numerially messy, especially when there are multiple legs contacting the ground at various points in time. Challenges remain in going from a hypothesis of optimality to a fast and reliable computation of the consequences of optimality.
I recently gave a basic tutorial on "Trajectory Optimization" at the Conference on Dynamic Walking, 2010, held at the MIT Media Lab. Here are the slides and the MATLAB codes that went with the tutorial. Comments and questions are welcome. For some more technical details on related problems, refer to this recent Interface paper.
Muscle mechanics. Stability of muscle micro-structure, muscle energetics, and simplified muscle models.
Friction mechanics. Micro-mechanics of friction.
Mechanics of rolling objects, multi-body dynamics. Mechanics miscellany.
 |
